接近覺傳感器檢測是否與被測物體接近以及靠近的距離和對象面的斜度,達到控制位置、探索和控制路徑等。

顯然,接近覺傳感器越靠近對象物,則越能精確測量,故一般把接近覺傳感器裝在機器人手爪的前端。從而使機器人能及時發現前方的障礙物,而避免碰撞。根據接近覺傳感器的制作材料和制作工藝,可分為電磁感應式、電容式、氣壓式以及超聲波和微波式等多種。實際工作中要用哪一種傳感器,則需要根據具體對象而定。例如,對象物為金屬面的接近覺傳感器,則一般采用電磁感應式。
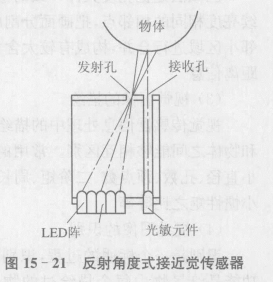
如圖15-21中所示的接近覺傳感器,將個發光元件沿橫向直線排列(線陣),并使之按一定順序發光,根據反射光量的變化及其時間,就可以求出發射角,從而確定被測物體的距離。