控制系統(tǒng)受階躍干擾后,從一個(gè)穩(wěn)定狀態(tài)變化到另一個(gè)穩(wěn)定狀態(tài),期間被控參數(shù)隨時(shí)間而變化。研究過(guò)渡過(guò)程的目的是為了研究控制過(guò)程的質(zhì)量。過(guò)渡過(guò)程可以是發(fā)散振蕩的、等幅振蕩的,也可以是單調(diào)衰減的。最為典型的則是如圖48-5所示的衰減振蕩過(guò)程。發(fā)散振蕩與等幅振蕩過(guò)程,均屬于不穩(wěn)定的控制過(guò)程。在連續(xù)控制過(guò)程中它們均是不允許的,但在雙位控制過(guò)程中,只要波幅與波動(dòng)頻率在工藝允許范圍內(nèi),卻是可以采用的。
圖48-5是自控系統(tǒng)受階躍干擾后質(zhì)量指標(biāo)示意圖。圖中t0是受干擾前被控參數(shù)的穩(wěn)態(tài)值,t∞是干擾發(fā)生后新的穩(wěn)態(tài)值。為了評(píng)估控制過(guò)程的質(zhì)量,一般規(guī)定以下幾種質(zhì)量指標(biāo):
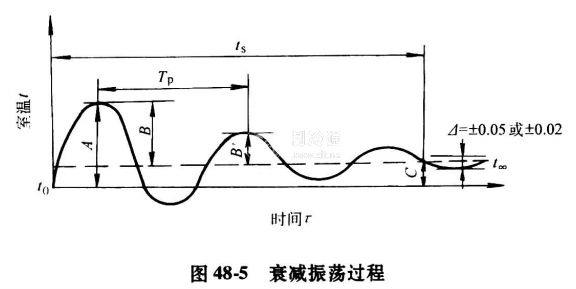
1.)衰減比n。它表征了控制過(guò)程的衰減程度,其值為前后兩個(gè)同相位波峰值之比。
2)最大偏差A。被控參數(shù)偏離給定值的最大量稱(chēng)為最大偏差A,也稱(chēng)動(dòng)態(tài)偏差、最大超調(diào)量。設(shè)計(jì)控制系統(tǒng)時(shí),必須對(duì)該值作出限制性規(guī)定,A值大則質(zhì)量差。
3)靜態(tài)偏差C。它是指被控參數(shù)新的穩(wěn)態(tài)值t∞。與給定值t0之差,是表征控制精度的另一個(gè)重要質(zhì)量指標(biāo)。它對(duì)工藝過(guò)程、圍護(hù)結(jié)構(gòu)的熱工要求、自動(dòng)控制方案及整個(gè)工程造價(jià)影響很大,因此應(yīng)根據(jù)需要慎重取值。
4)控制時(shí)間。它是指控制系統(tǒng)受到干擾作用后,被控參數(shù)的過(guò)渡過(guò)程曲線進(jìn)入新穩(wěn)態(tài)位的±5%(或±2%)范圍內(nèi),不再越出時(shí)所需要的時(shí)間。實(shí)際上這是一個(gè)理論上的考核指標(biāo),常以Ts表示。
5)振蕩周期。過(guò)渡過(guò)程中,從第一波峰到第二個(gè)波峰之間的時(shí)間,常以Tp表示。
以上五個(gè)質(zhì)量指標(biāo)中,只有靜態(tài)偏差C為靜態(tài)指標(biāo),其他均為動(dòng)態(tài)指標(biāo)。這五個(gè)指標(biāo)反映了控制系統(tǒng)三方面的性能:①衰減比和最大偏差反映了控制系統(tǒng)穩(wěn)定性指標(biāo);②靜態(tài)偏差反映了控制系統(tǒng)的精度指標(biāo);③控制時(shí)間和振蕩周期是反映系統(tǒng)快速性的指標(biāo)。